Innovation in Engineering Computational Technology
Chapter
2 A.A. Becker*, P. Wang*, I.A. Jones*, A.T. Glover+, S.D. Benford+, C.M. Greenhalgh+ and M. Vloeberghs#
*School of Mechanical, Materials and Manufacturing Engineering, +School of Computer Science and Information Technology, #School of Human Development, Division of Child Health, University of Nottingham, United Kingdom Keywords: virtual reality, surgery simulation, haptic feedback, boundary element method, finite element method, computational mechanics.
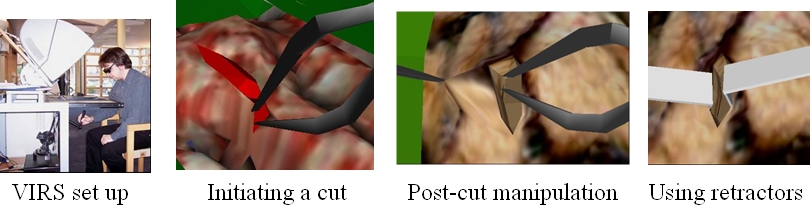
Virtual Reality (VR) simulations utilise computational methods that allow the user to interact with a "virtual world" through sensory feedback in the forms of visual, audio and, or haptic feedback. Compared to flight simulation, in which VR techniques have become an integral component in training pilots, the use of VR simulators in surgery is not as widespread. However, recent breakthroughs in the development of real-time deformable models through the use of computational mechanics techniques and haptic feedback devices, such as the Phantom force-feedback device from SensAble Technologies [1], has prompted the medical profession to seriously consider the benefits of VR surgery - at least as a training tool for surgeons [2,3]. There are many challenges for developers of VR surgery simulators. These include providing simultaneous visual (deformation) and haptic (force) feedback in real-time, reducing the number of elements needed to discretise the model of the organ without affecting the visual realism, simulating contact between deformable bodies, non-linear material behaviour of the organs, geometric non-linearity and complete separation or removal of parts of organs or tumours. Numerical approaches used to simulate real-time deformable models can be divided into two main groups; lumped-mass-spring methods and continuum mechanics techniques. Lumped-mass-spring methods are relatively simple to implement but do not strictly adhere to the laws of continuum mechanics which require continuity between adjacent elements. Consequently, they may suffer from lack of realism and instability of the deformable models. Continuum mechanics techniques, namely the finite element (FE) and boundary element (BE) techniques, are robust and potentially far more reliable and accurate than lumped-mass methods. However, since they require the solution of often thousands of simultaneous equations, they are much more computationally expensive. In this paper, an overview of the use of real-time computational mechanics techniques, namely the FE and BE methods in VR surgery simulations, is presented. Brief outlines of how the conventional FE and BE formulations can be manipulated to produce real-time deformable simulations are presented. A recent review of deformable models for surgery simulation [4] has identified the BE technique as being one of the most promising routes to surgical simulation. A BE-based VR surgery simulation system, called VIRS, is presented that supports two-handed interaction with three-dimensional stereovision and haptic force feedback. Highlighted features include the simulation of prodding, pulling, cutting, contact with retractors and post-cutting manipulations. Examples of some surgical manipulations are shown in Figure 1. Initial trials of the VIRS system by surgeons [5] have indicated that a sufficient degree of realism can be achieved, and that such simulators can play a useful role in surgical training. There are, however, many challenges to address; these include more realism by simulating bleeding, complete removal of tumours, non-linear material deformation and faster self-contact.
References
| ||||||||||